News
Re-Exam Grades and DiscussionWritten on 26.04.24 by Eddy Ilg Dear Students, the re-exam and final grades have been published at: the exam discussion will be today from 3-5pm. Best,
Eddy |
Re-Exam Grades Available on April 24th and Exam Discussion on April 26thWritten on 29.03.24 by Eddy Ilg Dear Students, the re-exam grades will be available on April 24th. The re-exam discussion will take place on April 26th from 3-5pm. Happy Easter! Eddy |
Re-Exam TomorrowWritten on 25.03.24 by Eddy Ilg Dear Students, the re-exam tomorrow will start at 10am and take place in Building E1 3, Room 002. Best, Eddy |
Final Grades UpdatedWritten on 21.03.24 by Eddy Ilg Dear Students,
Dear Students,
We have updated this and double checked everything. Unfortunately, this means that some of your grades have changed for the better and for the worse. Please find the correct version in the spreadsheet. I am sorry for the confusion. Here is the grading policy explained: Best,
Eddy
|
Final GradesWritten on 20.03.24 by Eddy Ilg Dear Students, unfortunately, there is one more bug in the spreadsheet that will change the final grades. This will be fixed tomorrow morning. Unfortunately, it means that the final grades will change. I need to apologize for this. The examination office did initially not inform us that the… Read more Dear Students, unfortunately, there is one more bug in the spreadsheet that will change the final grades. This will be fixed tomorrow morning. Unfortunately, it means that the final grades will change. I need to apologize for this. The examination office did initially not inform us that the grades had to be released before the re-exam and therefore we were in a bit of rush. Best,
Eddy |
Final Grades OutWritten on 20.03.24 by Eddy Ilg Dear Students, the final grades are released in: Dear Students, the final grades are released in: |
Important: please check group assignments until 12pmWritten on 20.03.24 by Eddy Ilg Dear Students, some of you let me know some changes in group assignments in the assignments and project. For those that were said to contribute only little to the project, we will give 25% of the credit for the project instead of 100%. Important: please check all your group assignments in this… Read more Dear Students, some of you let me know some changes in group assignments in the assignments and project. For those that were said to contribute only little to the project, we will give 25% of the credit for the project instead of 100%. Important: please check all your group assignments in this spreadsheet until 12pm: After that no more changes will be possible. Best,
Eddy |
Project Grades are outWritten on 19.03.24 by Eddy Ilg Dear Students, please find the project grades at: Final grades will be released tomorrow. Best,
Eddy |
Plagiarism for Team 14 + 7023705 and Team 12Written on 18.03.24 by Eddy Ilg We found out that your solutions identical. Please come to my office tomorrow at 11am. |
Important: Exam Insight, Project Grades, Re-ExamWritten on 18.03.24 by Eddy Ilg Dear Students, the examination office has let me know that your grades have to be finalized before you can register for the re-exam. For this reason, the exam insight will be tomorrow from 12pm to 3pm. We will also finalize your project grades, such that your final grade will be in the system… Read more Dear Students, the examination office has let me know that your grades have to be finalized before you can register for the re-exam. For this reason, the exam insight will be tomorrow from 12pm to 3pm. We will also finalize your project grades, such that your final grade will be in the system Wednesday morning. It is important to note that after that it is impossible to change it on your transcript. For registration of the re-exam, you will be able to do so Wednesday or Thursday. Best,
Eddy |
Schedule ChangedWritten on 17.03.24 by Eddy Ilg Dear Students, please note the following schedule changes: Best,
Eddy |
Exam ResultsWritten on 15.03.24 by Eddy Ilg Dear Students, please find the exam results here: Best,
Eddy |
Project Presentations on Monday the 18thWritten on 15.03.24 by Eddy Ilg Dear Students, please find information about the project presentations here: Important: please check the time for your team and let me know if there are… Read more Dear Students, please find information about the project presentations here: Important: please check the time for your team and let me know if there are conflicts by emailing cvmp-3dvision@cs.uni-saarland.de This is just a reminder that the submission deadline is Monday 8am. Please include in your submission: Good luck! |
Re-Exam RegistrationWritten on 15.03.24 (last change on 15.03.24) by Eddy Ilg Dear Students,
For those of you who just like to repeat the exam to improve your grade, you may do so by registering for the re-exam. Grades will be… Read more Dear Students,
For those of you who just like to repeat the exam to improve your grade, you may do so by registering for the re-exam. Grades will be announced Monday morning as well. Best,
Eddy |
Stage 1 Data v4 OnlineWritten on 15.03.24 by Eddy Ilg Dear Students,
Please switch to the version 4 data that is online now. Best,
Eddy |
Stage 3 Data OnlineWritten on 12.03.24 by Eddy Ilg Dear Students, please find the description of the project stage 3 in the materials section. As the data is too large to upload to CMS, it contains a link to Google drive to download the data. Best, Eddy |
Office HoursWritten on 12.03.24 by Eddy Ilg Dear students, due to a conflict, the office hours will take place from 5-7pm today. Best,
Eddy |
Stage 1 New Version and Stage 2 Data OnlineWritten on 10.03.24 by Eddy Ilg Dear Students,
Dear Students,
Best,
Eddy |
Office HoursWritten on 05.03.24 by Eddy Ilg Dear Students, due to the ECCV deadline in this week, the office hour today is reduced from 5-6pm and the office hour on Thursday is shifted to Friday 2-4pm. Best,
Eddy |
Exam TimeWritten on 26.02.24 by Eddy Ilg Dear Students, the exam time and place is: Best,
Dear Students, the exam time and place is: Best,
Eddy |
Assignment GradesWritten on 22.02.24 by Eddy Ilg Dear Students, please find the assignment evaluation here:
Eddy |
Looking for HiwiWritten on 21.02.24 by Eddy Ilg Dear Students, Michael Hahn is a close collaborator of our lab and looking for Hiwi to support an exciting project in the intersection of language, vision and neuroscience. The contract can be between 4 and 16 hours per week. Please find the lab website here: Dear Students, Michael Hahn is a close collaborator of our lab and looking for Hiwi to support an exciting project in the intersection of language, vision and neuroscience. The contract can be between 4 and 16 hours per week. Please find the lab website here: To apply, please send transcripts and CV to:
Eddy |
Registration for Exam Ends Today 23:39Written on 21.02.24 by Eddy Ilg Dear Students, this is just a notice that the registration for the exam ends tonight at 23:59. If you were admitted and would like to take the exam, please register in LSF. Best,
Eddy |
Office HoursWritten on 20.02.24 by Eddy Ilg Dear Students,
Dear Students,
Best,
Eddy |
Admission to ExamWritten on 20.02.24 by Eddy Ilg Dear Students, please find the list of admitted students below. The following groups have been admitted to the exam: The following groups have not been admitted to the exam: For the groups 13 and 14 we… Read more Dear Students, please find the list of admitted students below. The following groups have been admitted to the exam: The following groups have not been admitted to the exam: For the groups 13 and 14 we have detected a case of plagiarism. Please come talk to me during the project office hours. The following student IDs are admitted to the exam (please check):
Eddy
|
Stage 1 Data v2 OnlineWritten on 19.02.24 (last change on 19.02.24) by Eddy Ilg Dear Students, we have provided a new version of the stage 1 data with a scale invariant evaluation function. Please use the newly provided data. Best,
Eddy |
Important InformationWritten on 18.02.24 by Eddy Ilg Dear Students, please note the following important information:
Dear Students, please note the following important information:
Best,
Eddy |
Assignment 6 Submission ExtendedWritten on 09.02.24 by Eddy Ilg Dear Students, it seems there was an issue with the COLMAP assignment. In the virtual machine, you need to execute "conda activate base" instead of "conda activate colmap". To this end, we have granted an extension until Monday 8am for the… Read more Dear Students, it seems there was an issue with the COLMAP assignment. In the virtual machine, you need to execute "conda activate base" instead of "conda activate colmap". To this end, we have granted an extension until Monday 8am for the assignment. Best,
Eddy
|
Project Stage 1 Data OnlineWritten on 06.02.24 by Eddy Ilg Dear Students, please find the data and description for stage 1 of the project in the materials section. Best,
Eddy |
No Lecture on Friday the 9thWritten on 05.02.24 by Eddy Ilg Dear Students,
Dear Students,
Best,
Eddy |
Assignment 6 OnlineWritten on 25.01.24 by Eddy Ilg Dear students, please find the final assignment 6 online in the materials section. It is due Feb 9th 8am. Best,
Eddy |
Assignment 5 OnlineWritten on 16.01.24 by Eddy Ilg Dear Students, please find assignment 5 online. Note that it is due next Friday the 26th at 8am. Best,
Eddy |
Course Evaluation Online (until 01/31)Written on 15.01.24 by Eddy Ilg Dear Students, it has been great to work with all of you so far, and I would like to thank everyone for attending the first 3D computer vision lectures! While it has been the first time for the course, and we know that some content still has to be improved, we would appreciate any feedback from… Read more Dear Students, it has been great to work with all of you so far, and I would like to thank everyone for attending the first 3D computer vision lectures! While it has been the first time for the course, and we know that some content still has to be improved, we would appreciate any feedback from you that helps us improve the course even further in the future. Please take a few minutes to fill out the evaluation form: Tutorial: Best,
Eddy |
Notes on Assigment 4Written on 10.01.24 by Eddy Ilg Dear students, Dear students, Best,
Eddy |
Assignment 4 Online and Merry ChristmasWritten on 23.12.23 (last change on 23.12.23) by Eddy Ilg Dear Students, the assignment 4 is online and is due Jan 12th. Please post any questions in the forum. You have been a great class in 2023, and it is great to work with you. I wish you a Merry Christmas and a Happy New Year! Best,
Eddy |
Lecture on 12/22Written on 18.12.23 by Eddy Ilg Dear Students, please note that there will be a lecture on the upcoming Friday, 12/22. There will be video recordings available. The next exercise will be release on this Friday. You will have the first two weeks to complete it. Please note that in the first week of January there are no… Read more Dear Students, please note that there will be a lecture on the upcoming Friday, 12/22. There will be video recordings available. The next exercise will be release on this Friday. You will have the first two weeks to complete it. Please note that in the first week of January there are no lectures. Best,
Eddy |
Assignment 3 OnlineWritten on 11.12.23 by Eddy Ilg Dear Students, please find assignment 3 in the materials section and note that it is due next Monday 8am. Best,
Eddy |
Student GroupsWritten on 08.12.23 by Eddy Ilg Dear Students, our student Kunwar Maheep Singh is looking for a group. If there is a remaining spot in any group, please message him at kusi00001@stud.uni-saarland.de and update the Google spreadsheet at: Dear Students, our student Kunwar Maheep Singh is looking for a group. If there is a remaining spot in any group, please message him at kusi00001@stud.uni-saarland.de and update the Google spreadsheet at: Best,
Eddy |
Assignment 2 CorrectionWritten on 08.12.23 (last change on 08.12.23) by Eddy Ilg Dear Students, unfortunately, there is a small error in assignment 2. Please note the following correction: this should be the "world y-axis".
Dear Students, unfortunately, there is a small error in assignment 2. Please note the following correction: this should be the "world y-axis".
Eddy |
Assignment 2 BonusWritten on 08.12.23 by Eddy Ilg Dear Students, we have added a bonus question to the assignment 2. Please find it in the materials section. Best, Eddy |
Assignment 2 OnlineWritten on 05.12.23 (last change on 05.12.23) by Eddy Ilg Dear Students, please find assignment 2 in the materials section and note that it is due next Monday 8am. Best, Eddy |
Exercise and Lecture TomorrowWritten on 03.12.23 by Eddy Ilg Dear Students, tomorrow we will discuss exercise 1 and continue with the lecture. Please note that for the exercise discussion, there will be *no* video recordings, as we do not want that people from future semesters have access to the sample… Read more Dear Students, tomorrow we will discuss exercise 1 and continue with the lecture. Please note that for the exercise discussion, there will be *no* video recordings, as we do not want that people from future semesters have access to the sample solutions. Best,
Eddy |
Updated Keypoints for 2b and 2c and Deadline ExtensionWritten on 30.11.23 (last change on 30.11.23) by Eddy Ilg Dear Students, thank you for pointing out that there was an issue with the keypoints for tasks 2b and 2c. Please find a zip file with updated keypoints in the materials section and use it accordingly. Dear Students, thank you for pointing out that there was an issue with the keypoints for tasks 2b and 2c. Please find a zip file with updated keypoints in the materials section and use it accordingly. Best,
Eddy |
No Exercise TomorrowWritten on 30.11.23 by Eddy Ilg Dear Students, unfortunately, I am still struggling with the Covid infection, and there will be no class meeting tomorrow. The exercise deadline will be extended until Monday for which I will follow up with a post shortly. Monday will then be the exercise discussion and the two missed… Read more Dear Students, unfortunately, I am still struggling with the Covid infection, and there will be no class meeting tomorrow. The exercise deadline will be extended until Monday for which I will follow up with a post shortly. Monday will then be the exercise discussion and the two missed lectures from last Monday and next Monday will be made available by video. Best,
Eddy
|
No lecture tomorrow due to COVID caseWritten on 26.11.23 by Eddy Ilg Dear Students, unfortunately, I have tested positive for COVID. Due to these circumstances, there will be no lecture tomorrow. I will provide the material as a video for everyone in the next days. Best,
Eddy |
Group ID and SubmissionWritten on 26.11.23 by Eddy Ilg Dear Students, I have extended the deadline, please try once more if you can register your team now. Best,
Eddy |
Group IDWritten on 20.11.23 by Eddy Ilg Dear Students, please use the group ID from CMS. Please do NOT use the group ID from the spreadsheet. Best, Eddy |
Virtual MachineWritten on 15.11.23 by Eddy Ilg Dear Students, please find the virtual machine online at: PLEASE NOTE: all submissions must be runnable in this virtual machine.
Eddy |
Assignment 1 OnlineWritten on 12.11.23 by Eddy Ilg Dear Students, please find the assignment 1 in the Materials section. An updated virtual machine will be provided tomorrow. Best,
Eddy |
Change in Upcoming LecturesWritten on 12.11.23 by Eddy Ilg Dear students,
Dear students,
Best,
Eddy |
Submission Deadline ExtendedWritten on 10.11.23 by Eddy Ilg Dear Students, we are still in the process of preparing exercise 1 and will release it tomorrow. Upon request, since there is CVPR deadline in a few days, the submission deadline of the exercise will be extended to Dec 1st. I will provide more information in the lecture on… Read more Dear Students, we are still in the process of preparing exercise 1 and will release it tomorrow. Upon request, since there is CVPR deadline in a few days, the submission deadline of the exercise will be extended to Dec 1st. I will provide more information in the lecture on Monday. Best,
Eddy |
E-Mails for Group MembersWritten on 10.11.23 by Eddy Ilg Dear Students, for those of you who don't know their group members yet - please also provide your E-Mail at: Best,
Eddy |
Names and Immatriculation IDsWritten on 10.11.23 by Eddy Ilg Just a reminder to please fill in your full names and matriculation IDs: https://docs.google.com/spreadsheets/d/1imQEpU-laCKUuoxVrZT477OLLg9CjenK2lGD-tdpbGI/edit?usp=sharing |
Groups and Virtual MachineWritten on 08.11.23 by Eddy Ilg Dear Students, this is just a reminder to please register for groups in this spreadsheet: Dear Students, this is just a reminder to please register for groups in this spreadsheet: Best,
Eddy |
Lecture on Friday (11/10)Written on 06.11.23 by Eddy Ilg Dear Students, please note that the upcoming Friday, we will have a lecture and tutorial to introduce the first exercise. Best,
Eddy |
Slides and Recordings OnlineWritten on 30.10.23 by Eddy Ilg Dear Students, the slides for the introduction and first lecture as well as today's recording have been uploaded. Please let me know if you have any trouble accessing them. Best,
Eddy |
Course Contact E-MailWritten on 26.10.23 (last change on 26.10.23) by Eddy Ilg Please send all E-Mails regarding the course to: cvmp-3dvision@cs.uni-saarland.de. Please do not use my personal E-Mail. |
Location ChangedWritten on 26.10.23 by Eddy Ilg Hi everyone, please note: the location for the lecture and the exercises was changed to Gebäude E1 3 - Hörsaal I (0.01.1). Best,
Eddy |
Intro Lecture on Friday Oct. 27thWritten on 23.10.23 by Eddy Ilg Hi everyone, the first introductory lecture will take place this Friday at 8:30am in Gebäude E1 3 - Hörsaal III (0.03.1). This lecture will give an overview of the field and the course material. After this, there will be a lecture every Monday at 8:30am and a tutorial every Friday at 8:30am in… Read more Hi everyone, the first introductory lecture will take place this Friday at 8:30am in Gebäude E1 3 - Hörsaal III (0.03.1). This lecture will give an overview of the field and the course material. After this, there will be a lecture every Monday at 8:30am and a tutorial every Friday at 8:30am in the same location. Looking forward to seeing you, Eddy |
Course Registration OpenWritten on 23.10.23 by Eddy Ilg Hi everyone, the course registration on CMS is now open. Please contact me if you have issues registering. Eddy |
Lecture extended to 9 ECTSWritten on 02.10.23 by Eddy Ilg Dear Students, in the end of the lecture, there will be an exciting project on building your own SLAM pipeline. Due to the additional work, we decided to extend the lecture to 9 credit points similar to the lecture Neural Networks: Theory and Implementation. Best,
Eddy … Read more Dear Students, in the end of the lecture, there will be an exciting project on building your own SLAM pipeline. Due to the additional work, we decided to extend the lecture to 9 credit points similar to the lecture Neural Networks: Theory and Implementation. Best,
Eddy |
New 3D Computer Vision LecturesWritten on 25.07.23 (last change on 25.07.23) by Eddy Ilg The CVMP lab will offer the new lectures “3D Computer Vision” and “3D Real World Modeling and Inference” in upcoming winter and summer semesters. The CVMP lab will offer the new lectures “3D Computer Vision” and “3D Real World Modeling and Inference” in upcoming winter and summer semesters. The 3D Real World Modeling and Inference lecture will teach you how to design models in 3D. It will start with introducing the basic 3D representations ranging from point clouds to meshes, triplanes and voxel grids. Basic and modern deep learning techniques to train and perform inference on these representations will be introduced. Afterwards, the recent implicit representations such as NeRF and DeepSDF with MLPs and how to encode 3D scenes with them efficiently will be covered. Many modern models involve generative models and subsequently the basics of generative models from autodecoders to GANs and finally diffusion models will be presented. |
3D Computer Vision
Summary
Computer vision has led to many recent technology breakthroughs and is today one of the most demanded fields. 3D computer vision is becoming increasingly important, and the field has recently shown remarkable progress.
This lecture will teach you the fundamentals of 3D computer vision. After having given an intuition of the field and traditional methods, it will proceed to state-of-the-art approaches and provide you with a basis for working on any 3D computer vision approaches.
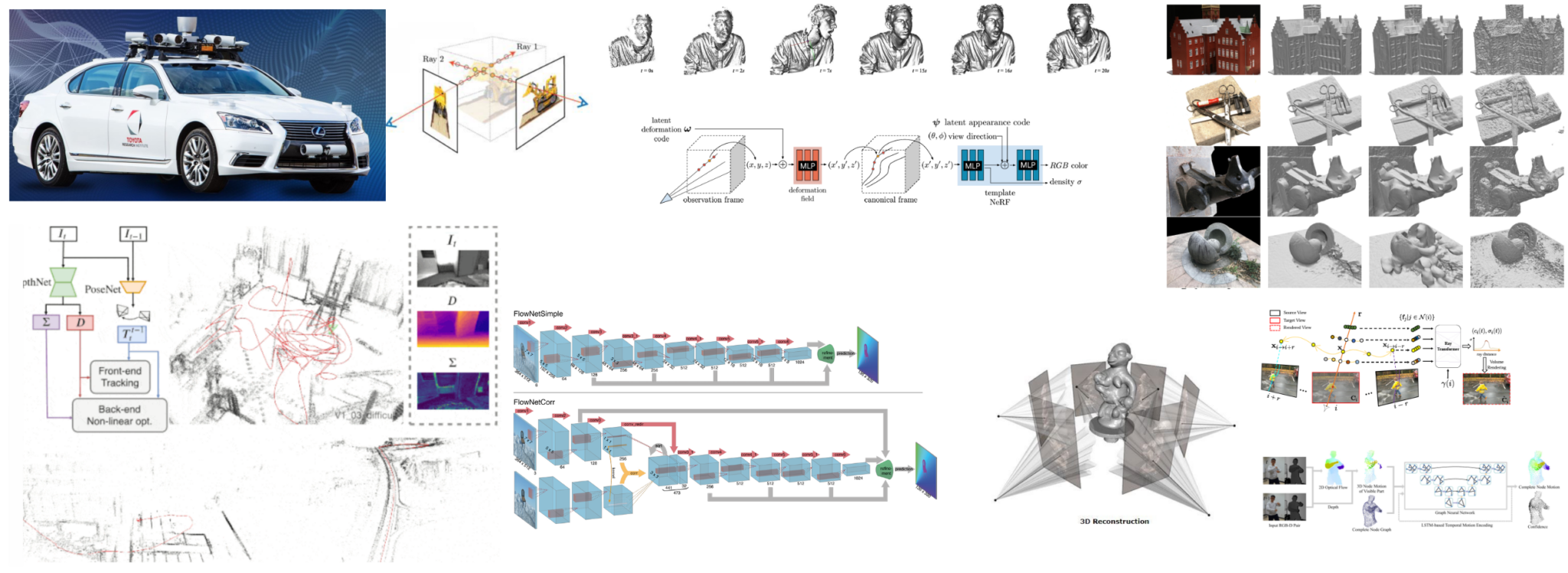
The lecture starts with fundamentals on projective geometry and sensor devices. It will then dive into correspondence and depth estimation techniques that provide the foundation of 3D reconstruction. Starting with feature extraction and matching, the lecture will continue with stereo depth estimation, optical flow and scene flow estimation. Having covered the fundamentals, the lecture will proceed to complete reconstruction pipelines ranging from SfM, COLMAP and KinectFusion to the modern deep learning techniques NeRF and NeuS.
The lecture will then advance to online reconstruction with simultaneous localization and mapping (SLAM) approaches and show applications in autonomous driving and AR technology. Finally, the lecture will conclude with the most challenging discipline of generic non-rigid reconstruction.
The lecture will be accompanied by hands-on exercises comprised of sheets and coding tasks. Towards the end of the lecture, there will be and challenging and fun project to set up a simple complete SLAM pipeline.
The lecture is the prerequisite for the 3D Real World Modeling and Inference lecture that will be held in summer and presents the foundation of modern deep learning techniques in 3D.
The lecture is offered by the Computer Vision and Perception Lab that focuses on building the next generation machine perception algorithms. Please contact ilg@cs.uni-saarland.de if you are interested in working with the lab.
Requirements
- As a prerequisite for this course, you must have taken either “High Level Computer Vision” or “Neural Networks: Theory and Implementation” with the computer vision project in the end. You must be familiar with CNNs and how to implement and train them with PyTorch.
- Having taken “Computer Graphics” and “Image Processing and Computer Vision” is helpful, but not required.
Credit Points
9 ECTS (advanced lecture with project)
Lecturer
Prof. Eddy Ilg
Syllabus
Lecture 1: Acquisition Devices (RGB-, ToF-, Event-Cameras; LIDARs; IMUs) and Calibration
Lecture 2: Feature Extraction and Matching
Lecture 3: Projective Geometry and Image Formation, Part 1
Lecture 4: Projective Geometry and Image Formation, Part 2
Lecture 5: Rotations and Spherical Harmonics
Lecture 6: Stereo Depth Estimation Methods
Lecture 7: Optical Flow Estimation Methods
Lecture 8: Scene Flow Estimation Methods
Lecture 9: Rigid 3D Reconstruction: SfM, COMAP, KinectFusion, Sphere Tracing and Implicit Rep.
Lecture 10: Rigid 3D Reconstruction: Volumetric Representations (NeRF + NeuS)
Lecture 11: Visual Localization
Lecture 12: Simultaneous Localization and Mapping (SLAM) and Autonomous Driving
Lecture 13: Non-Rigid 3D Reconstruction (DynamicFusion, OcclusionFusion)
Lecture 14: Non-Rigid 3D Reconstruction (NeRFies, NeuS2, DynIBaR)
Exercises
Excercise 1: Geometry Fundamentals
Excercise 2: Estimating Poses with COLMAP and Visualizing Camera Rays
Excercise 3: Feature Matching with HoG and Deep-Learned Features
Excercise 4: Semi-Global Matching for Stereo Depth Estimation
Excercise 5: FlowNet for Optical Flow Estimation
Project: Implementing and Running a SLAM Pipeline